Ingenuity Survived Its First Near-Death Experience On Mars
Ingenuity is probably the world's favorite helicopter — if ever there was one. It's the first human-made vehicle that flew on Mars, not counting the landers that brought rovers along with the drone to the red planet. Ingenuity has taken off and landed a few times already, and those missions were accomplished without too many hiccups. The purpose of having an unmanned helicopter fly around on Mars is quite simple. We need to know what flying feels like before humans ever get there, and before we consider deploying human-crewed helicopters to move around. Ingenuity can deliver all that data about flying conditions while providing beautiful aerial images to humanity from a place that's tens to hundreds of millions of miles away in space.
The drone will relay all flight information back to base, telling NASA what goes according to plan and what doesn't. And it turns out that the chopper already had an unexpectedly bad experience during its sixth flight. This was Ingenuity's first near-death experience that we know off, but the Mars helicopter was able to deal with the situation and land safely after executing the mission.
It's actually thanks to human ingenuity that the drone was able to adapt to its in-flight issues, correct its course, and ultimately land safely. Flight six had a particular mission, as NASA wanted to expand the helicopter's flight envelope and have it take specific images while flying — here's what the mission was supposed to be, according to the space agency's blog:
Ingenuity was commanded to climb to an altitude of 33 feet (10 meters) before translating 492 feet (150 meters) to the southwest at a ground speed of 9 mph (4 meters per second). At that point, it was to translate 49 feet (15 meters) to the south while taking images toward the west, then fly another 164 feet (50 meters) northeast and land.
After 150 meters, things went wrong. "Ingenuity began adjusting its velocity and tilting back and forth in an oscillating pattern," and the behavior did not change for the remainder of the flight. The computer registered roll and pitch excursions of more than 20 degrees for the rotorcraft, large control inputs, and spikes in power consumption during the perilous part of the journey. Still, the onboard computer eventually landed Ingenuity safely.
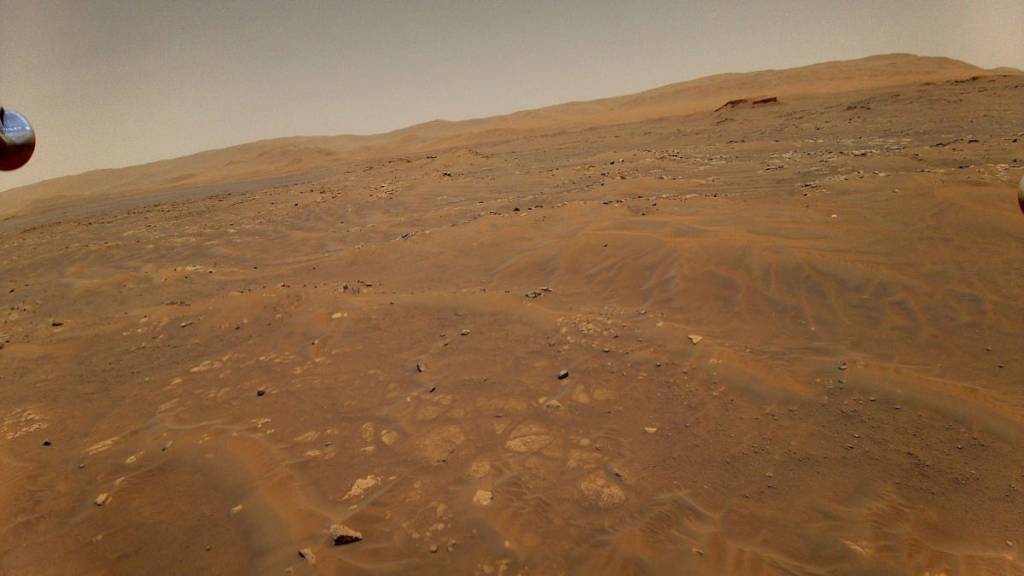
From NASA's blog: "This image of Mars was taken from the height of 33 feet (10 meters) by NASA's Ingenuity Mars helicopter during its sixth flight on May 22, 2021."
A computer error jeopardized the drone's integrity, but it's the same computer's fail-safes that allowed it to land the helicopter without extensive damage.
NASA explained in great detail what malfunctioned. Ingenuity keeps track of motion with two different systems. The onboard inertial measurement unit (IMU) looks at acceleration and rotational rates before turning that information into position, velocity, and altitude estimates. The computer reacts 500 times per second to that data flow in order to adjust control inputs.
But IMU works together with a secondary system to ensure it's accurate over time. Ingenuity captures 30 photos a second with the downward-looking navcams. The images are sent to the navigation system where they're all timestamped, and that's the first data that reaches the computer. An algorithm then analyzes the contents of each image, trying to predict where the drone should have been and where it actually is. The computer recognizes shapes and objects on the ground and rapidly tracks them from image to image. Using this flow of information, the computer can correct its estimates of position, velocity, and attitude.
But this system failed in flight six. Some 54 seconds into the flight, a couple of glitches occurred in the pipeline of images. A single image was lost and all navigation images after that were delivered with inaccurate timestamps. From this point on, the computer was using inaccurate information to determine flight parameters, leading to constant corrections of perceived errors. Ingenuity ended up performing large oscillatory moves.
However, the helicopter landed safely because the system is programmed to ignore the camera feed during the landing phase. Any erroneous data coming in at that point did not impact the computer's decisions during landing and the spacecraft was able to touch down just as designed.
Flight six might have been a failure, but NASA still collected precious information that can be used to prevent similar errors in the future:
In a very real sense, Ingenuity muscled through the situation, and while the flight uncovered a timing vulnerability that will now have to be addressed, it also confirmed the robustness of the system in multiple ways.
The full blog post on Ingenuity's sixth flight is available at this link.